
Xinran Wang
This is Xinran Wang’s website
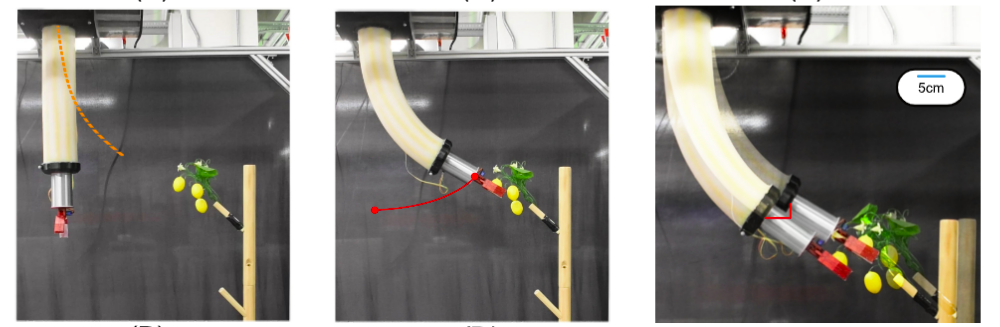
As a PhD researcher in the REDS lab at Imperial College London, I am focused on developing a soft continuum robot that can achieve continuous variable curvature capabilities. The novel design of this robot has enabled a more flexible workspace and has opened up the possibility for even more versatile and interactive activities with humans and objects. Our ultimate goal is to achieve complete control not only over the position but also the orientation at that location, all while using fewer actuators than previously required.
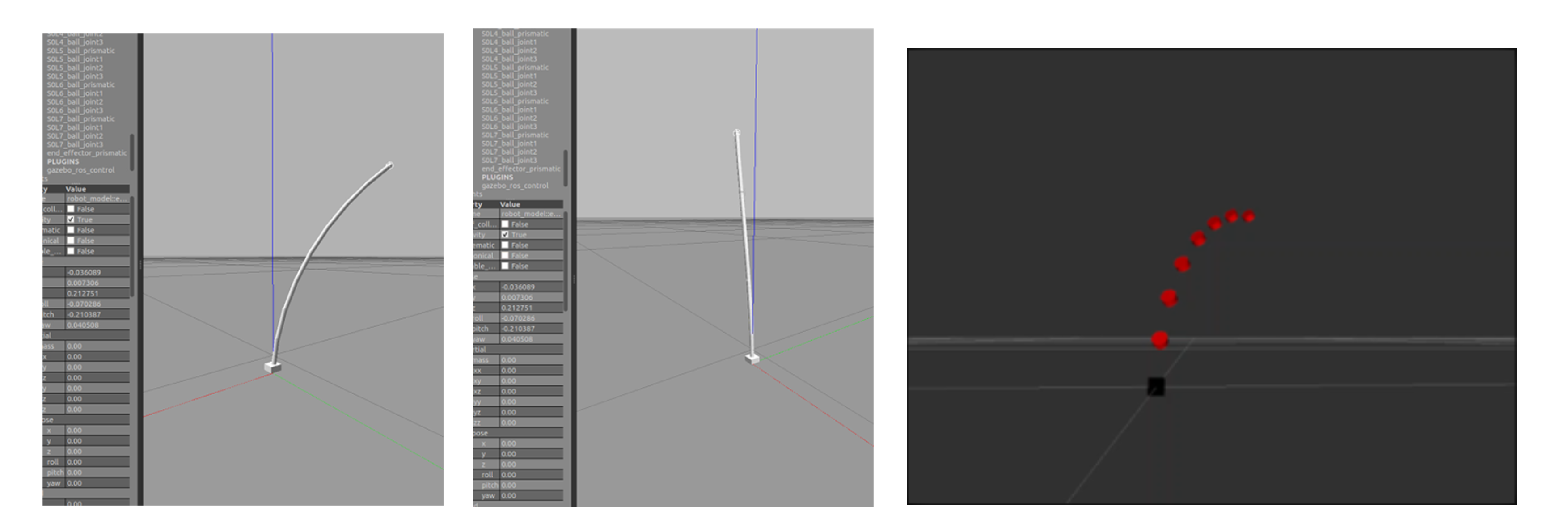
Variable curvature continuum robots have gained significant interest in recent research. Unlike traditional continuum robots, which require multiple sections to be controlled by several actuators, these robots are able to bend and perform complex motions with greater degrees of freedom, without needing as many actuators. This advancement in design has greatly expanded the capabilities of continuum robots and has opened up new possibilities for their use in various industries. By adjusting the local stiffness of the continuum robot, it becomes capable of exhibiting varying curvatures as desired. This remarkable feature enables the robot to assume diverse bending profiles when the control inputs are the same. Despite some advancements, the current research on variable curvature continuum robots is still limited by a small number of locking mechanisms or the need for pre-configuration. As a result, stiffness changes are only possible in a discrete fashion and on the section level.